



ALPGEN ROBOTİCS
Arduino L298N Voltaj Regulatörlü Çift DC Motor Sürücü Modülü
Ürün Kodu:TQKODSRSH1
Ücretsiz kargo

Uygun Fiyat
Ürün Açıklaması

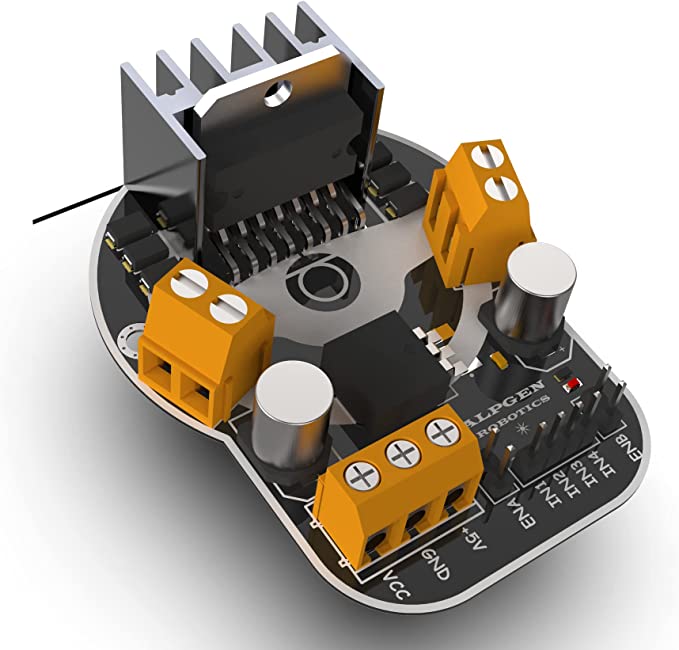
L298N DC MOTOR SÜRÜCÜ MODÜLÜ
L298N DC Motor Sürücü Modülü, DC motor kullanacağınız projelerde kullanarak motor kontrolü gerçekleştirebileceğiniz modüldür. Motor sürücü kartına bağlayacağınız 2 motoru ileri veya geri tam güçte ya da istediğiniz hızda sürebilirsiniz.
Nerede Kullanılır?
Arduino ile robotik kodlama projelerinde özellikle robotlarda L298N DC motor sürücü kullanılabilir. Çizgi izleyen robot, engelden kaçan robot, bluetooth kontrollü robot gibi Arduino projelerinde L298N Dc motor sürücü modülü kullanabilirsiniz. Modülün VCC pini pil girişi olup +5V pininden aldığınız güç ile Arduino'nuzu çalıştırabilirsiniz.
| Data Çıkışı | Dijital |
| Çalışma Voltajı | 5V DC |
| En | 52.05mm |
| Boy | 69.37mm |
| Vida Delik Çapı | 3.2mm |
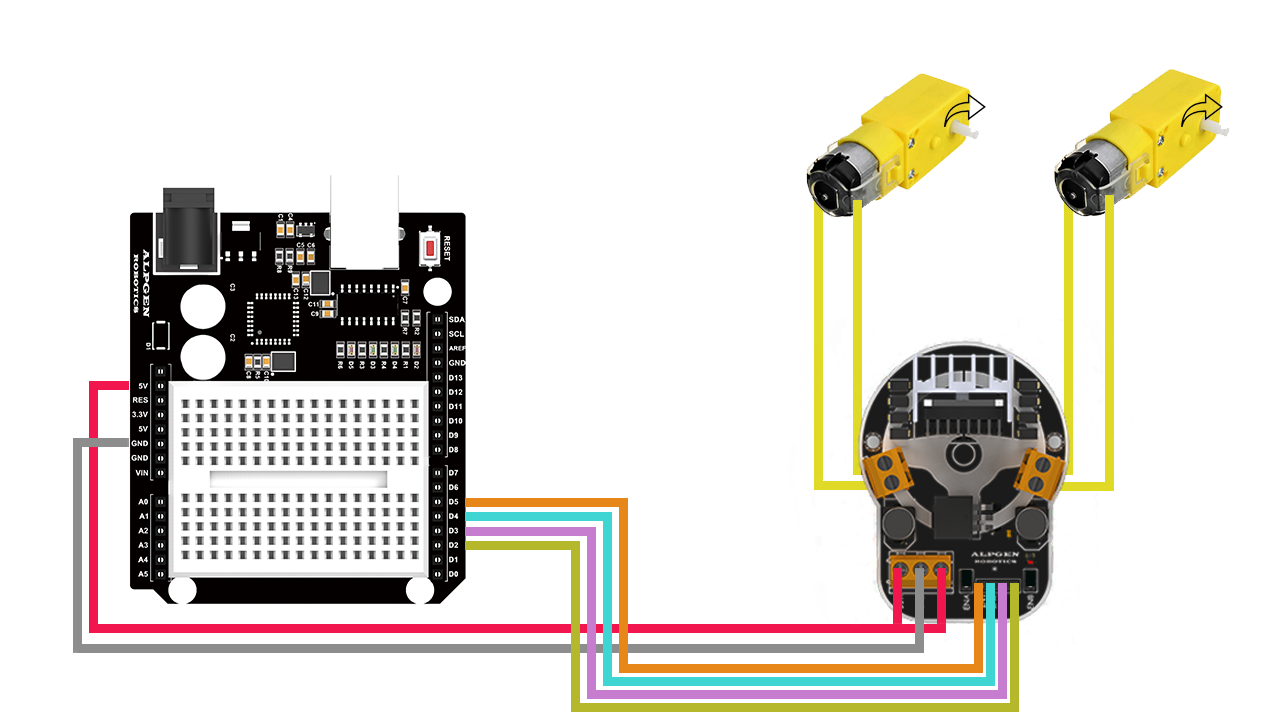
Örnek Proje Devre Şeması
Bu projede L298 DC Motor Sürücü Modülünün IN1 giriş D2 pinine, IN2 giriş D3 pinine, IN3 giriş D4 pinine, IN4 giriş D5 pinine bağlanması ve her saniye yön değiştiren 2 DC motor kodlanmıştır. ENA ve ENB pinleri ise Arduino'nun 5V pinine bağlanarak motorların tam hızda dönmesi sağlanmıştır. Hız ayarı yapabilmek için ENA ve ENB pinlerini PWM pinlerine takarak ona göre kodlama yapmamız gerekirdi.
| L298N DC Motor Sürücü Modülü | Arduino Uno Breadboard |
| IN1 | 5 |
| IN2 | 4 |
| IN3 | 3 |
| NI4 | 2 |
Örnek Proje Arduino Kodu
/* ALPGEN Robotics */ // L298N Motor Sürücü Modülü Kullanımı // 05.08.2021 // Soru ve Yardım İçin: [email protected] // www.alpgenrobotics.com // // 1. Motor için pinlerin tanımlanması int motor1pin1 = 2; int motor1pin2 = 3; // 2. Motor için pinlerin tanımlanması int motor2pin1 = 4; int motor2pin2 = 5; void setup() { // Tanımlanan pinlerin çıkış olarak ayarlanması pinMode(motor1pin1, OUTPUT); pinMode(motor1pin2, OUTPUT); pinMode(motor2pin1, OUTPUT); pinMode(motor2pin2, OUTPUT); } void loop() { // 1. ve 2. Motorların 1. pinlerine güç verilmesi digitalWrite(motor1pin1, HIGH); digitalWrite(motor1pin2, LOW); digitalWrite(motor2pin1, HIGH); digitalWrite(motor2pin2, LOW); //1000mslik bekleme yapılması delay(1000); // 1. ve 2. Motorların 2. pinlerine güç verilmesi digitalWrite(motor1pin1, LOW); digitalWrite(motor1pin2, HIGH); digitalWrite(motor2pin1, LOW); digitalWrite(motor2pin2, HIGH); //1000mslik bekleme yapılması delay(1000); }
SEPETE EKLE
Bu ürün için henüz yorum yapılmamış.